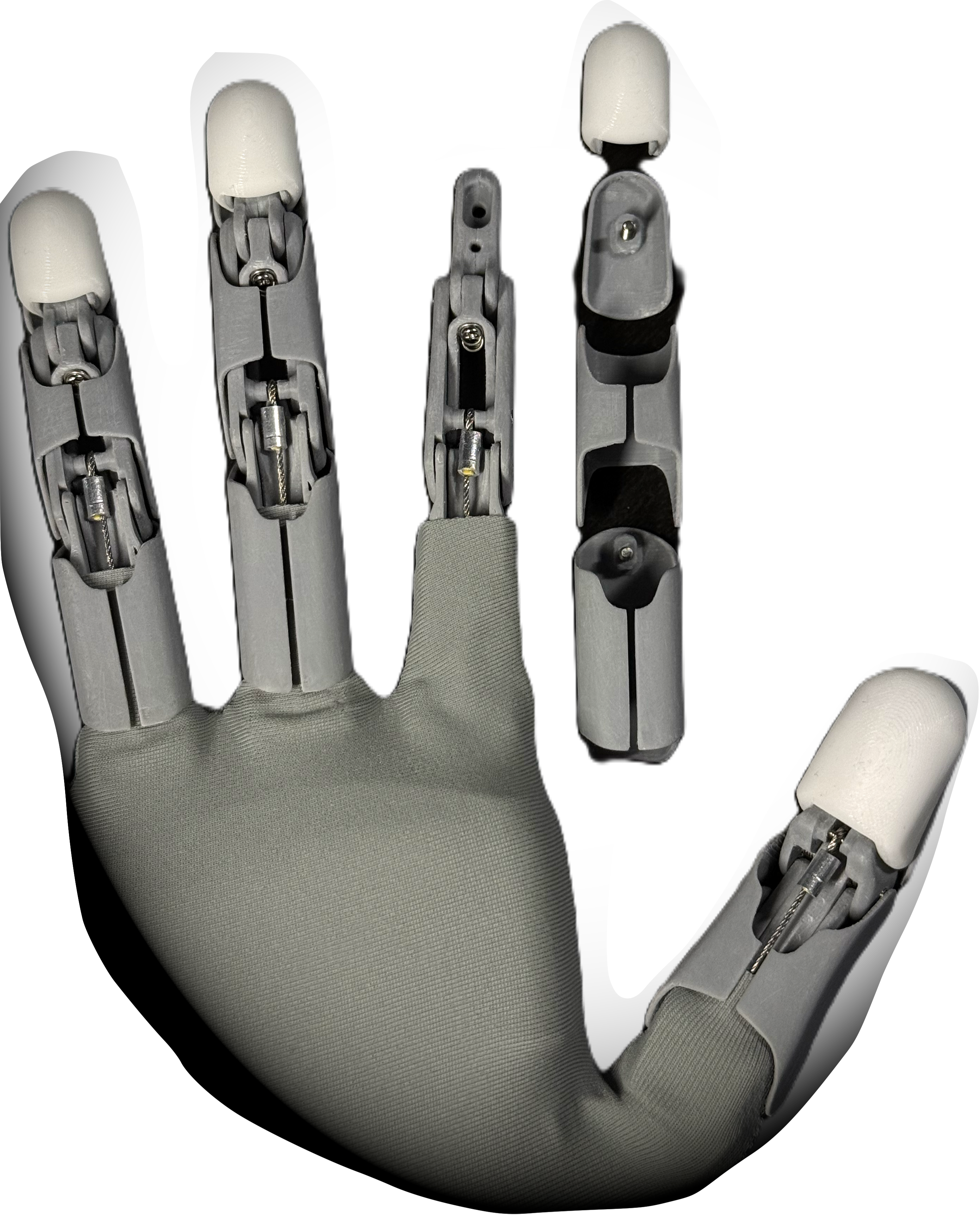
Joints19
Degress of Freedom(active)10
CommunicationUSB-C, Bluetooth, WiFi
MicrocontrollerESP32-S3
SensorsPosition (at motor output), Current, Temperature
Control Loop Speed100 Hz
Payload (grasping – dynamic)1 kg
Payload (grasping – static)4 kg
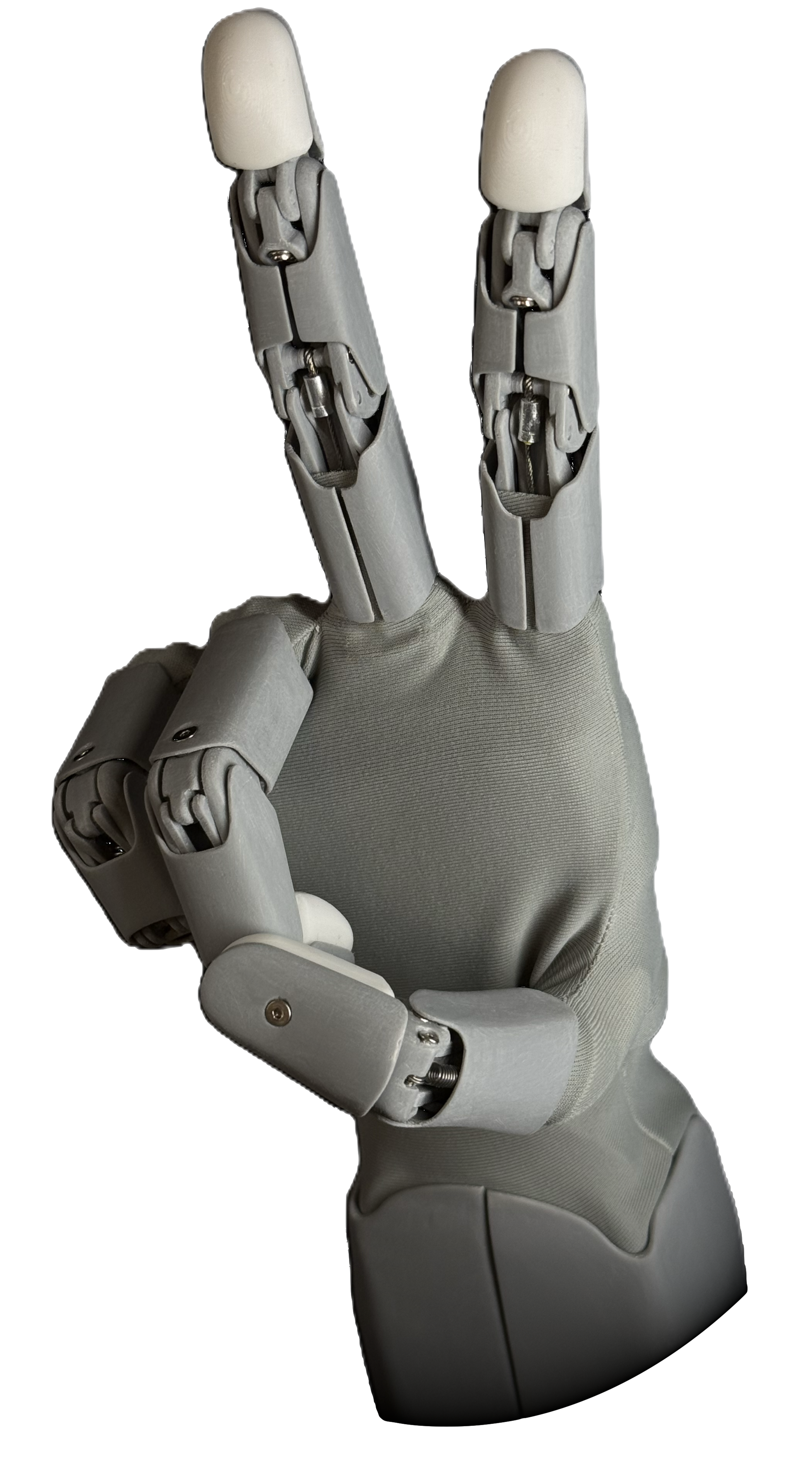
Speed (fingers)300°/s
Speed (wrist)150°/s
Weight~450 g
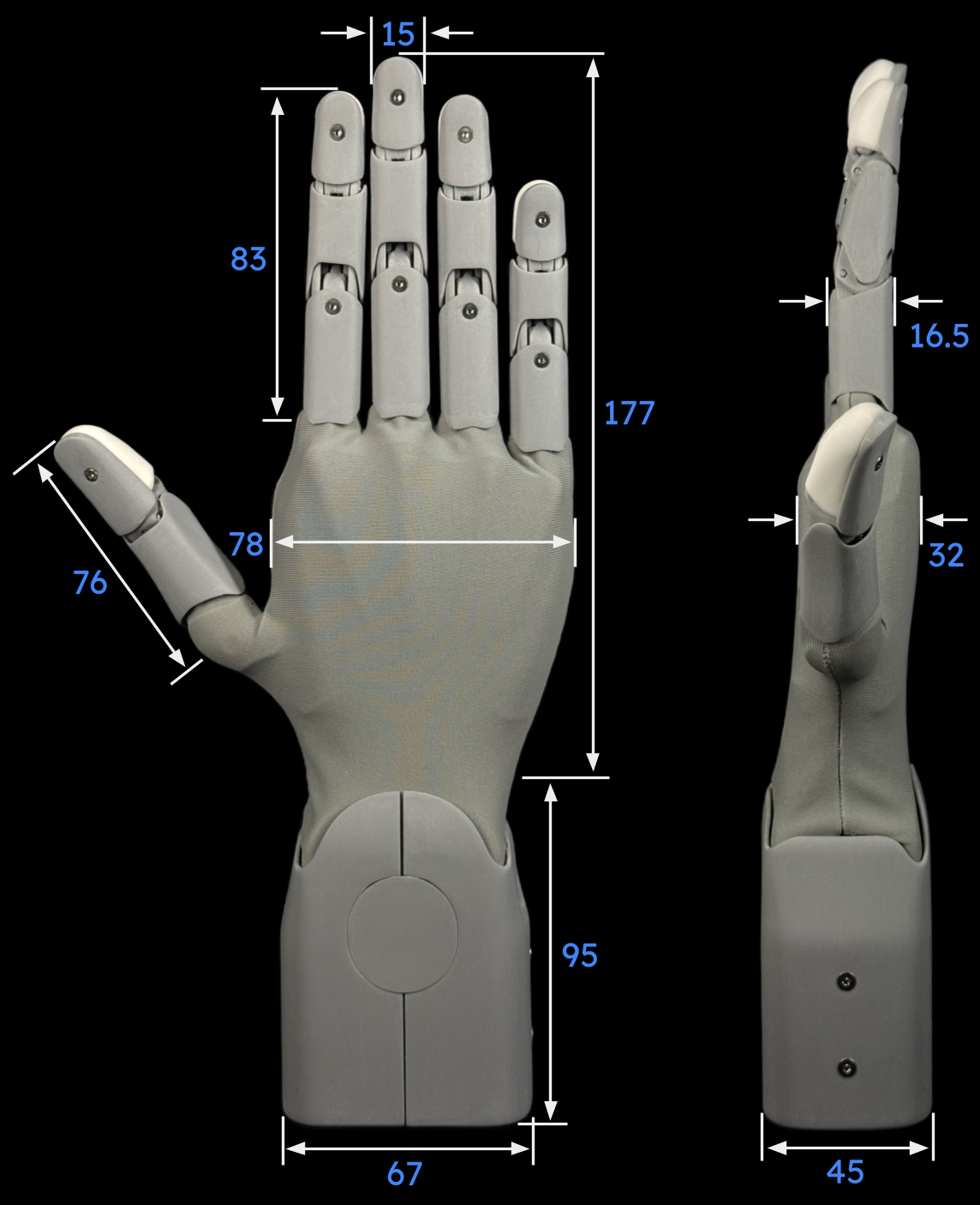
Height (wrist base - middle finger)272 mm
Width (ulnar palm edge - thumb)152 mm